dis8637-2023-2
solemne-02 grupo-05
integrantes
- barrenechea castillo, jacinta
- bugueño aguilera, javiera antonia
- cuevas calderón, matías
descripción
Pista de aterrizaje es un proyecto lumínico que dinamiza la presencia humana en la rampa FAAD.
Para un encargo donde el objetivo fue transducir la actividad humana de un espacio en acción de diseño, se comenzó la observación de la rampa. Como conclusión, la rampa es un espacio donde los estudiantes realizan actividades diversas, como cruzar por ella, subirse o deslizarse. Para sistematizar la información, las actividades se enmarcaron entre dos coordenadas variables: la permanencia y el desplazamiento vertical, junto a la constante vital del proyecto: la presencia.
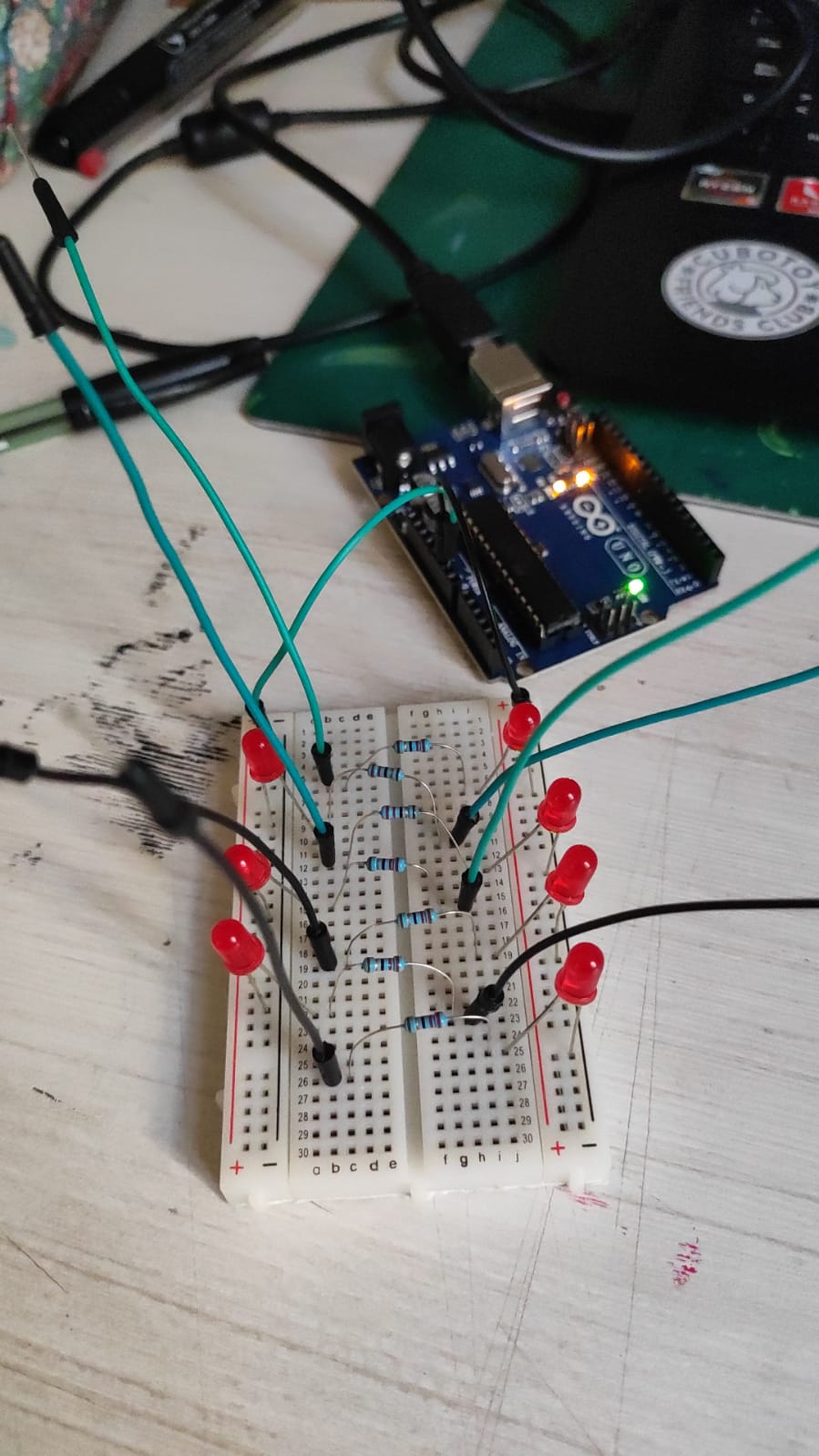
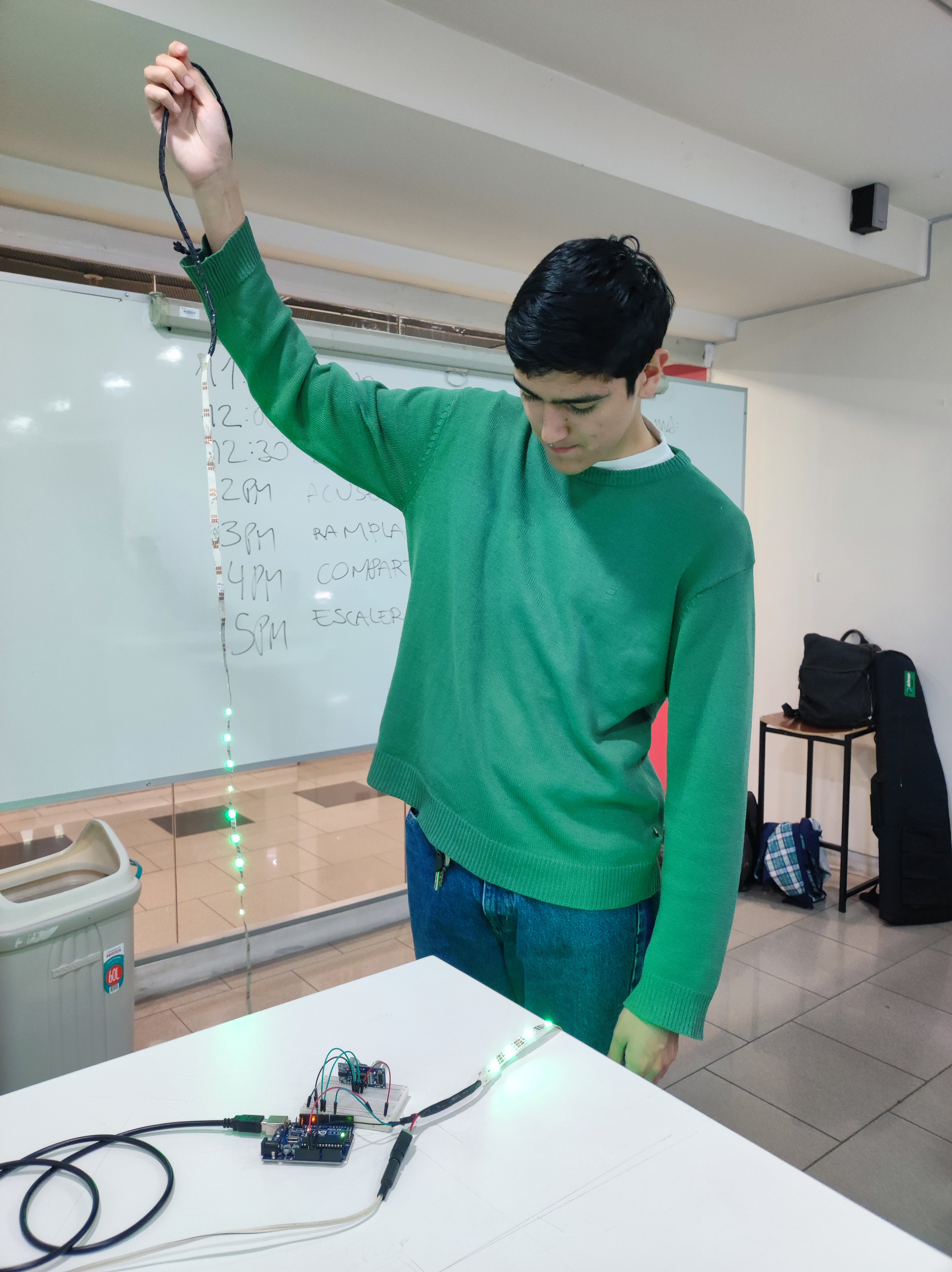
El diseño que se desarrolló combina la presencia con el desplazamiento vertical para potenciar el aspecto lúdico que la actividad humana ha dotado a la rampa. A través de un sistema eléctrico compuesto de sensores y animaciones lumínicas, el objetivo del proyecto es incentivar el uso de la rampa como un lugar para deslizarse.
El tipo de información que ingresa el sistema, es la proximidad humana al sensor ubicado en el sector más elevado de la rampa, lo cual determina el tipo de ritmo que las luces reproducen. Entonces, a medida que el usuario cambia su posición, subiendo o bajando, interactúa con el sensor y las luces varían; siendo en la parte más alta cuando el movimiento de las luces sugiere a la rampa como una pista de aterrizaje.
imágenes

código
// sectorizar posicion con sensor ultrasónico
// definir numero de pins
const int trigPin = 9;
const int echoPin = 10;
// definir variables
long duracion;
double distancia;
double distanciaAnterior = 0;
// variables de valores minimo y maximo
// empezamos con valores muy errados
int valorMin = 10000;
int valorMax = 0;
//definimos sectores
float sector[4] = { 0, 0, 0, 0 };
int rangoIgnorar = 1500;
bool debug = true;
//requerimientos para neopixel
// Required for 16 MHz Adafruit Trinket
#include <Adafruit_NeoPixel.h>
#ifdef __AVR__
#include <avr/power.h>
#endif
// Arduino pin that connects to NeoPixel
#define ledPin 6
// The number of LEDs (pixels) on NeoPixel
#define ledNum 60
Adafruit_NeoPixel neoPixel(ledNum, ledPin, NEO_GRB + NEO_KHZ800);
int pix;
void setup() {
// iniciamos la comunicacion serial
Serial.begin(9600); // iniciailzamos la comunicacion
// definimos funciones de los pines
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// INITIALIZE NeoPixel strip object (REQUIRED)
neoPixel.begin();
neoPixel.show();
neoPixel.setBrightness(255);
}
void loop() {
// set all pixel colors to 'off'. It only takes effect if pixels.show() is called
neoPixel.clear();
//actualizar valor de distancia
int distanciaNueva = medirDistancia();
// int distancia = medirDistancia();
if(distanciaNueva < 2000){
distancia = distanciaNueva;
}
else{
(distancia = 1000); }
// if (rangoApto(distanciaAnterior, distanciaNueva)) {
// distanciaAnterior = distancia;
// distancia = distanciaNueva;
// }
// actualizar valorMin
if (distancia < valorMin) {
valorMin = distancia;
}
// actualizar valorMax
if (distancia > valorMax) {
valorMax = distancia;
}
actualizarSector();
// imprimir en consola el momento del sensor
if (distancia <= sector[3]) {
Serial.println("arriba");
// put your main code here, to run repeatedly:
// los pixeles van aumentando cada 1
pix++;
// hace más fluida la animación, es posibe crear un for o un if si se quiere
pix %= ledNum;
//color
neoPixel.setPixelColor(pix, 0, 255, 0);
// muestra la info de color y de brillo
neoPixel.show();
delay(30);
//pixeles apagados
neoPixel.setPixelColor(pix, 0, 0, 0);
// como hago para hacer que no sea solo 1 pin el que se prende, sino 2, 3, 5 ??????
}
else if (distancia <= sector[2]) {
Serial.println("medio");
// turn on all pixels to red at the same time for two seconds
for (int pixel = 0; pixel < ledNum; pixel++) {
if (pixel % 2 == 0) {
neoPixel.setPixelColor(pixel, neoPixel.Color(0, 255, 0));
neoPixel.show();
}
}
neoPixel.clear();
delay(300);
for (int pixl = 0; pixl < ledNum; pixl += 1) {
if (pixl % 2 == 1) {
neoPixel.setPixelColor(pixl, neoPixel.Color(0, 255, 0));
neoPixel.show();
}
}
neoPixel.clear();
delay(300);
} else if (distancia <= sector[1]) {
Serial.println("bajo");
// turn on all pixels to red at the same time for two seconds
for (int pixel = 0; pixel < ledNum; pixel++) {
if (pixel % 2 == 0) {
neoPixel.setPixelColor(pixel, neoPixel.Color(0, 255, 0));
neoPixel.show();
}
}
neoPixel.clear();
delay(700);
for (int pixl = 0; pixl < ledNum; pixl += 1) {
if (pixl % 2 == 1) {
neoPixel.setPixelColor(pixl, neoPixel.Color(0, 255, 0));
neoPixel.show();
}
}
neoPixel.clear();
delay(700);
} else {
Serial.println("sin presencia");
// turn pixels to green one by one with delay between each pixel
// for each pixel
for (int pixel = 0; pixel < ledNum; pixel++) {
// it only takes effect if pixels.show() is called
neoPixel.setPixelColor(pixel, neoPixel.Color(0, 255, 0));
// send the updated pixel colors to the NeoPixel hardware.
neoPixel.show();
// pause between each pixel
delay(50);
}
// turn off all pixels for two seconds
neoPixel.clear();
/*for (int pixl = 0; pixl > ledNum; pixl++) {
neoPixel.setPixelColor(pixl, neoPixel.Color(0, 255, 0));
neoPixel.show(); // send the updated pixel colors to the NeoPixel hardware.
delay(50); // off time
}*/
}
Serial.print("distancia: ");
Serial.println(medirDistancia());
// if (debug) {
// delay(100);
//}
// Serial.print("Max ");
// Serial.println(valorMax);
// Serial.print("Min ");
// Serial.println(valorMin);
}
double medirDistancia() {
// Ultrasonic Sensor HC-SR04 and Arduino Tutorial
// by Dejan Nedelkovski, www.HowToMechatronics.com
long lduracion = 0;
double ldistancia = 0;
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Reads the echoPin, returns the sound wave travel time in microseconds
lduracion = pulseIn(echoPin, HIGH);
// Calculating the distance
ldistancia = lduracion * 0.034 / 2;
//aplicamos return
return ldistancia;
}
void actualizarSector() {
// dividimos el rango del sensor en 4 posibles posiciones
for (int i = 0; i < 4; i++) {
sector[i] = ((valorMin + valorMax) / 4) * (4 - i);
}
}
// bool rangoApto(double antiguo, double nuevo) {
// if (nuevo - antiguo >= rangoIgnorar) {
// return false;
// } else {
// return true;
// }
// }